20.06.2024
Autonomiczny robot mobilny – co to jest i jak sprawdza się na produkcji?
W tym artykule wyjaśniamy, czym jest autonomiczny robot mobilny. Wyjaśniamy zastosowania autonomicznego robota mobilnego i niewielką różnicę między tak zwanym AGV (pojazdem sterowanym automatycznie lub Automated guided vehicle). Podajemy przykłady wykorzystania robotów mobilnych w produkcji i ich zastosowania w konkretnych branżach. Poznaj wyzwania stojące przed działami utrzymania ruchu w firmach korzystających z robotów mobilnych i wózków AGV. Dowiedz się, czy system CMMS jest w stanie wspierać działania konserwacyjne, utrzymnia ruchu z wykorzystaniem tej technologii na produkcji.
Spis treści
Czym jest robot mobilny?
Robot mobilny to urządzenie, które jest w stanie zdalnie wykonywać złożone czynności delegowane do realizacji określonych zadań. Spektrum możliwości robotów mobilnych, poprzez jazdę, pływanie czy latanie, wykorzystywane jest w różnych gałęziach przemysłu, gdzie praca manualna wykonywana przez personel zastępowana jest pracą robotów.
Adaptacje robotów mobilnych w przedsiębiorstwach zyskały na popularności wraz z rozwojem technologii, czego efektem jest na przykład rozwój autonomicznych robotów AGV (autonomous guided vehicle).

Autonomiczne roboty mobilne znalazły zastosowanie w tych branżach:
Produkcja i logistyka
W przemyśle produkcyjnym i logistyce, autonomiczne pojazdy transportowe przenoszą części między stacjami montażowymi oraz zarządzają magazynami, zwiększając efektywność procesów. Adaptacja pojazdów AVG w tych gałęziach przemysłu jest bardzo szeroka, o czym więcej opowiemy dalej w tym artykule.
Branża usług publicznych
Autonomiczne pojazdy są używane do transportu publicznego oraz zarządzania ruchem, pomagając w utrzymaniu porządku i bezpieczeństwa w miastach. Roboty sprzątające i konserwacyjne pracują w dużych budynkach, na lotniskach i w innych miejscach publicznych, utrzymując czystość i porządek. Ich aplikacje są wciąż bardzo ograniczone z uwagi nie niebezpieczeństwo związane z ich użyciem w otwartej przestrzeni publicznej.
Serwis i utrzymanie ruchu
Branża usług terenowych UR wykorzystuje roboty automatyczne do pracy w odległych lokalizacjach, takie jak drony do sprawdzania stanu dróg lub stanu linii kolejowych, gdzie robot automatyczny porusza się po szynach, aby sprawdzić ich zdatności do użytku.
Lotnictwo i kosmonautyka
Autonomiczne systemy są stosowane w lotnictwie do obsługi naziemnej samolotów oraz w misjach kosmicznych do eksploracji i zbierania danych z odległych planet. Pierwszym przykładem użycia robota autonomicznego w kosmonautyce było misja na marsa w 1997 roku.
Ponadto, autonomiczne roboty są wykorzystywane w innych branżach jak usługi konsumenckie i komercyjne, czy do eksploracji podwodnej, opieki zdrowotnej, w laboratoriach i instytucjach edukacyjnych do badań nad nawigacją.

Czym są roboty AGV?
Autonomiczne pojazdy sterowane (AGV) to roboty zaprojektowane do autonomicznego transportu materiałów, wykorzystywane głównie w środowiskach produkcyjnych i logistycznych. Pojazdy AGV są wyposażone w zaawansowane systemy lokomocji, możliwości percepcji i strategie nawigacji, aby skutecznie wykonywać swoje zadania.
Roboty AGV stanowią kluczowy element nowoczesnej automatyki przemysłowej, poprawiając wydajność i zmniejszając nakład pracy ludzkiej w powtarzalnych zadaniach transportowych.
Kluczowe aspekty autonomicznych robotów mobilnych nawiązują do całego zestawu ich umiejętności motorycznych, czyli funkcji określających ich możliwości poruszania się i wykonywania określonych prac. Innymi słowy, roboty AGV muszą włączać określone cechy lokomocji i nawigowania aby efektywnie funkcjonować w środowisku pracy. Muszą zatem rozpoznawać podstawowe kwestie dotyczące stabilności obszaru, balansu, charakterystyki kontaktu z otoczeniem i rodzaju środowiska:
1. Zachowanie stabilności i balans:
- Liczba i geometria punktów styku: Odnosi się do liczby i rozmieszczenia punktów styku między obiektami lub powierzchniami, co wpływa na stabilność i równowagę systemu.
- Środek ciężkości: Lokalizacja punktu, w którym skoncentrowana jest cała masa obiektu, określająca jego zachowanie podczas ruchu lub w stanie równowagi.
- Stabilność statyczna/dynamiczna: Opisuje zdolność obiektu do utrzymania równowagi zarówno w spoczynku (stabilność statyczna), jak i podczas zmian położenia lub ruchu (stabilność dynamiczna).
- Nachylenie: Kąt nachylenia powierzchni, na której zachodzi interakcja, wpływający na siły działające na punkty styku i ogólną stabilność.
3. Charakterystyka punktu styczności z otoczeniem
- Rozmiar i kształt punktu styku, ewentualnie ścieżki: Określa obszar kontaktu między dwiema powierzchniami, co ma znaczenie dla rozkładu nacisku i przenoszonych sił (np.: pojazd określa trasę przejazdu po wytyczonych ścieżkach aby wykonać bezpieczny przejazd; często, w magazynach stosuje się maski magnetyczne naklejone na podłogę aby wytyczyć trasę przejazdy robota, aczkolwiek nowoczesne roboty wykorzystują już tylko sensory zamontowane na pojazdach).
- Nachylenie punktu styku (który jest punktem styku z urządzeniem): Kąt nachylenia powierzchni styku pod względem jej interakcji z otoczeniem, którego możliwość kognitywne wpływają na efektywność przenoszenia sił i minimalizację tarcia (np. pojazd jadący pod górę musi wykorzystać większą siłę napędową).
- Rodzaj tarcia: Określenie sił oporu występujących między dwiema stykającymi się powierzchniami, w zależności od ich materiału i warunków otoczenia (np.: pojazd AGV jadący po szkle rozsypanym na podłodze w magazynie, albo zwiększy moc przejazdu, aby przejechać przez powierzchnie lub zatrzyma się całkowicie aby nie uszkodzić osi i kół).
3. Rodzaj środowiska
- Struktura (np. woda, powietrze, miękkie lub twarde podłoże): Ten mankament motoryki robotów AGV wiąże się z rozpoznaniem właściwości środowiska, w którym zachodzi interakcja, takie jak chropowatość powierzchni, zawartość wilgoci lub gęstość, które mogą znacząco wpływać na stabilność i charakterystykę punktów styku.
W celu skutecznego działania w środowisku, na przykład, na hali produkcyjnej, roboty autonomiczne wykorzystują sensory, czujniki, kamery, które działają w oparciu o oprogramowanie. Odczyty czujników robota dostarczają wystarczającej ilości informacji, aby skutecznie manewrować i omijać przeszkody. Pomagają również przezwyciężyć inne ograniczenia, tworząc lokalną mapę środowiska wokół robota.
Ta lokalna mapa jest wirtualną siatką wypełnioną punktami styczności z bieżącymi odczytami czujników. W ten sposób to, co robot zdołał zarejestrować za pomocą czujników i kamer, pozwala mu stworzyć obraz otaczającego go środowiska i wytyczyć bezpieczną trasę przejazdu. Nowoczesne roboty skanują obszar co kilka milisekund, aby sprawdzić, czy na ich drodze nie pojawił się nowy obiekt (np. pracownik działu produkcji), co pomaga uniknąć niefortunnych wypadków.
Co to jest autonomiczny robot mobilny?
Autonomiczny robot mobilny to samojezdny pojazd, który nie wymaga zewnętrznego wsparcia sterowania. Tak jak zostało to wspomniane powyżej, wykorzystuje szereg czujników do nawigacji (sonar sensors) w otoczeniu po wytyczonych ścieżkach. Mając zakodowaną mapę środowiska, może poruszać się bezpiecznie po obszarze pracy, do którego maja też dostęp pracownicy produkcji.
Programowanie autonomicznego robota mobilnego wymaga udziału automatyka, który manualnie zapewnia wskazówki dla robota określając lokalizację i nawigację w obszarze pracy. Podczas programowania robota autonomicznego, wykonywana jest seria aplikacji, która integruje techniki z tak różnych dziedzin, jak interakcja człowiek-robot, widzenie komputerowe, rozpoznanie terenu, a nawet rozumienie mowy człowieka.
Wszystkie te czynności adaptacyjne polegają na określeniu poziomu tzw. wolności robota (ang. degrees of freedom), czyli obszaru, na którym robot ma się poruszać i w jaki sposób. Ponadto, mają one zapewnić maksimum bezpieczeństwa ludzi pracujących z robotem.
Jakie są rodzaje robotów autonomicznych?
Roboty autonomiczne są dostępne w różnych konfiguracjach dostosowanych specjalnie do środowiska pracy. W wielu przypadkach wykorzystuje się jednolita platformę jezdną z różnymi aplikacjami zamontowanymi na korpusie robota. Wyróżniamy trzy główne rodzaje robotów autonomicznych:
Pojazdy AGV bez operatora
Autonomiczny robot mobilny z hakiem do przewożenia ładunków. Są to, pociągi bez operatora, które składają się z lokomotywy, która ciągnie jedną lub więcej przyczep, tworząc pociąg. Ten typ systemu jest idealny do transportu ciężkich ładunków na duże odległości w magazynach lub fabrykach, zarówno z pośrednimi punktami odbioru i wysiadania na trasie, jak i bez nich. Pociągi te składają się zazwyczaj z 5 do 10 przyczep i działają jako wydajny system transportowy.
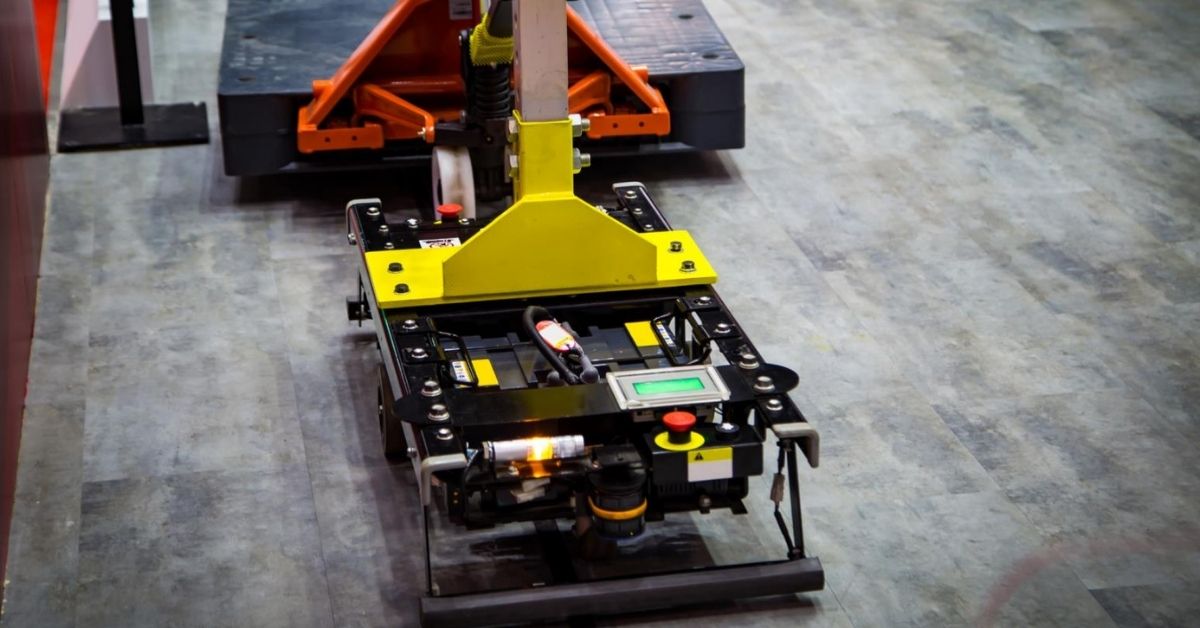
Wózki paletowe AGV
Autonomiczne roboty mobilne do transportu palet, to inaczej wózki paletowe AGV, które są używane do transportu ładunków na paletach po wcześniej zdefiniowanych trasach. Wózki te mogą udźwignąć kilka tysięcy kilogramów, a niektóre z nich są w stanie przewozić dwie palety jednocześnie. Są one przystosowane do ruchu pionowego w celu uzyskania dostępu do ładunków przechowywanych na regałach i półkach.

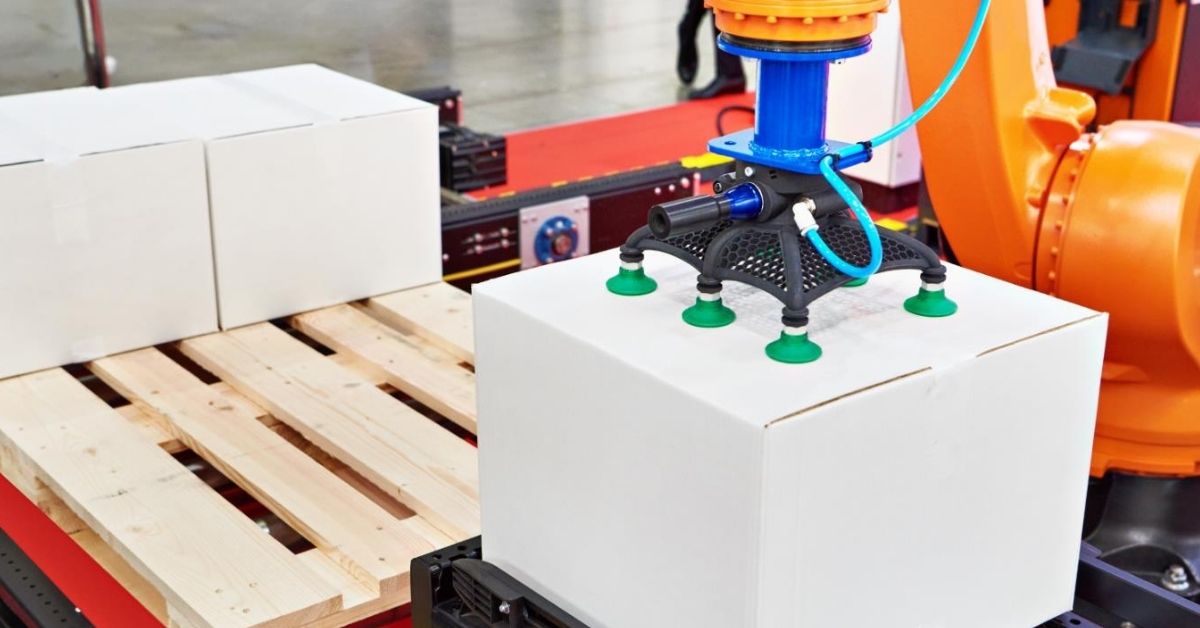
Wózki do ładunków jednostkowych
Wózki do przewozu ładunków jednostkowych są wykorzystywane do przemieszczania pojedynczych ładunków między stacjami oraz do automatycznego załadunku i rozładunku palet za pomocą mechanizmów rolkowych. Autonomiczny robot mobilny współpracujący z przenośnikiem rolkowym, to pojazdy specjalnie zaprojektowane do obsługi mniejszych ładunków, o ładowności zazwyczaj do 200 kilogramów lub mniejszej.
Robotyka i automatyka, a utrzymanie ruchu
Ważnym zagadnieniem dla firm produkcyjnych wykorzystujących autonomiczny robot mobilne jest metoda utrzymania ruchu. Jako, że roboty mobilne stanowią część urządzeń wspierających produkcje i ich utrzymanie operacyjne jest częścią pracy zespołów UR, lub automatyków zatrudnionych w firmie. Zakres pracy automatyków często zamyka się w obszarze kontroli pracy systemowej robotów, a podstawowe prace serwisowe są wykonywane przez techników UR.
Przykładem pracy działań UR dla autonomicznego robota mobilnego, może być potrzeba wymiany części najbardziej narażonych na zużycie. Niezależnie od tego, jakie koło jest używane, w robotach zaprojektowanych do pracy w terenie, to właśnie koła i system zawieszenia jest zwykle wymagany do utrzymania. Mimo, że jednym z najprostszych podejść do zawieszenia jest zaprojektowanie elastyczności samego koła, to i tak ich zużycie jest bardzo częste.
Na przykład, w przypadku niektórych czterokołowych robotów wewnętrznych, które wykorzystują koła samonastawne, producenci zastosowali odkształcalną oponę z miękkiej gumy aby stworzyć prymitywne zawieszenie. Oczywiście to ograniczone rozwiązanie nie może konkurować z zaawansowanym systemem zawieszenia w zastosowaniach, w których robot potrzebuje bardziej dynamicznego zawieszenia na znacznie nierównym terenie. Niemniej jednak, w obu przypadkach, to automatycy lub technicy działów UR będą dokonywać napraw i przeglądów pojazdów.

System CMMS dla automatyka
W związku z nieustannym rozwojem technologii, coraz częściej dostrzegamy potrzebę adaptacji nowoczesnych systemów do utrzymania ruchu dla poszczególnych działań i pracy wykonywanych w parku maszynowym ale również z obszarami powiązanymi z samą produkcją.
Nie ma wątpliwości, że dostosowanie rozwiązań CMMS do zarządzania zadaniami serwisy i przeglądów pojazdów AGV jest ważnym aspektem dla działów utrzymania ruchu, ale także dla działów automatyki odpowiedzialnych za utrzymanie autonomicznych robotów mobilnych.
Poniżej przedstawiamy cztery obszary, gdzie CMMS system wspiera
- Planowanie przeglądów i inspekcje: CMMS umożliwia zespołom utrzymania ruchu planowanie rutynowych inspekcji i zadań konserwacji zapobiegawczej dla AGV w oparciu o wskaźniki użytkowania, godziny pracy lub predefiniowane interwały. Takie proaktywne podejście minimalizuje nieplanowane przestoje i zmniejsza ryzyko nieoczekiwanych awarii pojazdów autonomicznych.
- Zarządzanie zleceniami pracy: Zespoły UR mogą tworzyć zlecenia pracy w CMMS w celu rozwiązania konkretnych problemów zgłoszonych podczas inspekcji lub przez automatyków dla wózków AGV, a nawet operatorów maszyn współpracujących z AGV (gdzie mobilne roboty dostarczają materiałów na produkcję). Zlecenia te mogą zawierać szczegóły, takie jak opis usterki, wymagane części i poziom priorytetu, usprawniając proces naprawy.
- Zarządzanie zapasami: Systemy CMMS często zawierają moduły zarządzania zapasami, które pomagają śledzić części zamienne i materiały eksploatacyjne używane do konserwacji AGV. Zapewnia to dostępność niezbędnych części w razie potrzeby, skracając przestoje związane z oczekiwaniem na ich dostarczenie.
- Śledzenie historii zasobów: Historia konserwacji każdego pojazdu AGV, w tym naprawy, wymiany kół, cz i inspekcje, może być rejestrowana i śledzona w systemie CMMS. Te dane historyczne zapewniają wgląd w wydajność AGV w czasie rzeczywistym i pomagają zidentyfikować powtarzające się problemy lub obszary wymagające poprawy.
Podsumowanie
Omówiliśmy autonomicznego robota mobilnego i jego zastosowania w różnych branżach, zwłaszcza w produkcji i logistyce. Roboty AGV (Autonomous Guided Vehicles) odgrywają kluczową rolę w automatyzacji obsługi materiałów, poprawie wydajności i zmniejszeniu nakładu pracy. Dla działów utrzymania ruchu adaptacja systemów CMMS (Computerized Maintenance Management System) jest niezbędna do skutecznego zarządzania konserwacją i utrzymaniem AGV.
Aby zmaksymalizować potencjał autonomicznych robotów mobilnych, warto rozważyć wykorzystanie systemu CMMS, który pomoże zaplanować konserwację, zarządzać zleceniami pracy, kontrolować zapasy i śledzić historię działań UR. Pomoże to zwiększyć dostępność AGV i zminimalizować nieplanowane przestoje. Skontaktuj się z nami już dziś i dowiedz się więcej na temat działania systemu CMMS i wsparcia w obszarze automatyki.
